熊谷組は、SOINNと共同で、不整地運搬車を自動で走行させる技術を開発したと発表した。これにより不整地運搬車の安全性の向上とオペレーター一人での複数台の運転管理により生産性向上を図ることができる。
-
不整地運搬車

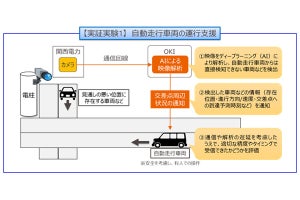
開発したAI制御技術は、教示運転に基づく単独の不整地運搬車に対する自動走行技術と、AIによる制御を組み合わせた制御技術で、2台以上の車両のスムーズな運行と、PCによる人の介在を少なくする省人化が可能となるという。
AI制御では複数台の不整地運搬車が繰り返し自動走行する際にも衝突等が発生しないよう安全な運行を制御させるため、従来は土砂積載の遠隔操作オペレーターのほかに、衝突等の安全確認を行いながらクローラキャリアの自走走行を行うオペレーター1名が必要だったが、AI制御によって衝突等の監視作業が不要となる。
-
AI制御フロー

不整地運搬車の自動走行技術は、最初に不整地運搬車のオペレーター運転席から離れた場所(操作室)で、走行状況をカメラ映像で確認しながら土砂積載場所から搬出場所まで遠隔操作で運転を行い(教示運転)、その操作内容をコンピュータに記憶させて不整地運搬車を自動走行(自動運転)させるもの。
今後はAI制御技術をさらに向上させるとともに、現場ごとの条件を反映させた精密な運行管理、運行管理の見える化による現場マネージメントの高度化、様々な現場に合わせた多様な装備の開発、建設機械の情報を加えた精度の高い運行管理、AI学習の蓄積や施工への反映の向上も目指し、安全面や運用方法の検討を十分に行い、本格的な実運用に向けて準備を進めていく。