電通国際情報サービス(以下 ISID)は、駅・空港ターミナルなどの公共施設や商業施設等におけるサービスロボット活用の早期実現を目指し、多種多様なロボットを一元的に制御し異なるロボット同士の連携を可能とする「マルチロボットプラットフォーム」の開発プロジェクトを立ち上げたことを発表した。
-
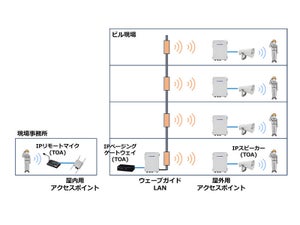
同プロジェクトが目指すマルチロボットプラットフォームの開発ステップ(出所:ISIDニュースリリース※PDF)

現在、サービス分野のロボット開発の多くは、目的の異なる機能開発を前提に進められているが、今後は多種多様なロボットが同一エリアで同時稼働することが想定され、機能開発や環境整備が不可欠になることが予想される。事業者にとっては、複数ロボットの統合管理による導入効果の最大化や運用効率化等の利点に加え、将来的に異なるロボット同士の自律的な連携が実現すれば、より快適で付加価値の高いサービスが可能となる。
ISIDは、羽田空港におけるロボットの技術検証と導入を目指すプロジェクト「Haneda Robotics Lab」に参画し、複数機種のロボットを同一エリアで円滑に稼働させるためのインフラ構想を支援してきた。また、宅配ロボットと遠隔コミュニケーションデバイスを用いた物品配送の実証実験を行うなど、ロボット技術の社会実装に向けた研究開発を進めている。同プロジェクトでは、これらの知見を生かし、サービスロボットの本格活用を早期に実現するプラットフォームの構築に取り組んでいくとしている。
プロジェクト発足に先立ち、ISIDはマルチロボットプラットフォームのプロトタイプを開発し、Haneda Robotics Labのロボット専用ネットワークと清掃ロボット、自律走行ロボット、タブレットPC、ヘッドマウント ディスプレイ、スマートスピーカー等を接続し、稼働実証実験を行った。
その結果、各ロボットの動作を一元管理できること、ロボットの稼働状況を取得して複数デバイス上でリアルタイムに表示・可視化できること、ひとつの指示で複数機種のロボットを同時制御できることなどが実証され、通信インフラとの接続・セキュリティ・耐障害性・稼働結果の可視化と制御のためのユーザーインタフェースの重要性といった観点で、数多くの知見を得るとともに解決すべき課題も抽出した。
今後は、同プロジェクトを通じて、マルチロボットの制御に必要な技術的要素と解決すべき課題を洗い出し、サービスロボット活用を目指す公共施設等の運営事業者や、ロボット開発に携わる先進テクノロジー企業、研究・教育機関などと連携しながら、段階的にプラットフォームの機能拡張と実証検証を進めていくとしている。