次世代プリンテッドエレクトロニクス技術研究組合(JAPERA)と新エネルギー・産業技術総合開発機構(NEDO)は、高精細で高感度な圧力センサーと、これをロボット・スキンに応用するシステムを開発したことを発表した。10月3日~6日(10:00~17:00)、幕張メッセで開催されている「CEATEC JAPAN 2017」では、同ロボット・スキンをヒト型ロボットに装着した、触感によるコミュニケーションシステムが展示されている。

|
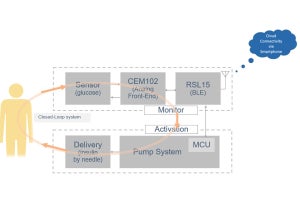
ロボット・スキンをヒト型ロボットに搭載したシステムのイメージ |
ロボットへの触感付与を実現するには、ロボットのボディに沿わせることができるような、柔らかい面状のセンサーが好まれ、その位置と力加減、それらの変化が瞬時に判断できるように、高精細で高感度なセンサーが必要となる。
今回、NEDOのプロジェクトにおいてJAPERAが開発した圧力センサーシートは、センシングする点それぞれにスイッチングトランジスタを持つアクティブマトリックス(交差するXY電極の各交点に形成される画素それぞれにスイッチングトランジスタを持つ方式で、目的の画素のみを駆動させることが可能)であり、従来のXY電極に同時に電圧を掛けて電極間に挟まれた画素を駆動するパッシブマトリックスと比べて、センシングする点の密度を高くした場合でも高い階調数を保つことができ、高精細化と高感度化を実現している。
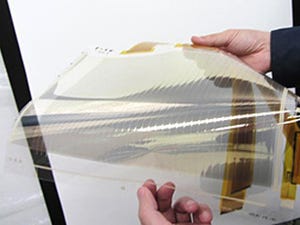
さらに、同アクティブマトリックスの有機薄膜トランジスタ(OTFT)は、柔らかなフィルム上に全て印刷プロセスで形成することが可能で、柔らかく、面状のセンサー形成を実現した。
これにより、ロボットに対してなでる、叩く、揉むなどのさまざまな触覚動作を認識させることができ、ヒトの皮膚感覚を備えたロボットの実現を大きく前進させるものとなっている。
また、大幅な印刷プロセスの簡略化が期待できるうえ真空プロセスが不要なため、製造施設の省スペース化や使用材料の省資源化が可能である。JAPERAは、こうした技術を用いて多数のセンサー素子で飛躍的に高感度の検出を可能にする薄く、フレキシブルな圧力センサーシートを開発しているほか、多機能化のひとつとして、圧力・温度同時検出シートセンサーの技術による温感の付与も検討しているということだ。
なお、今回開発した圧力センサーシートはフレキシブルフィルム上に構成したものだが、基材フィルムをストレッチャブル素材に替えることにより、さまざまな三次元曲面への対応やメディカル用途での人体への応用が期待できるとしている。