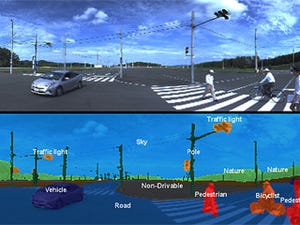
モルフォは、ステレオカメラで撮影された映像から、環境の3次元情報とカメラの位置姿勢を同時に推定する「Visual SLAM」(sSimultaneous Localization and Mapping)技術の提供を開始したことを発表した。
Visual SLAMは、カメラで撮影された映像から環境の3次元情報とカメラの位置姿勢を同時に推定する技術。同技術を利用することで、GPS信号の届かない状況でのロボットの自立走行などが実現可能になる。
また、同社のモルフォの画像処理技術とQonceptにて研究開発されている同技術を組込み合わせて、各事業分野への応用展開を推進しているという。応用事例として、無人搬送車(AGV)、宇宙探査ロボッ、ドローン、サービスロボットを挙げている。
なお、下の動画は、同技術を活用して環境地図作成とおよび自立走行を実現している様子である。