東京大学は、人間そっくりな眼科手術シミュレータを開発し、網膜硝子体手術用眼球モデルの開発と計測システムの統合に成功したと発表した。
同研究は、名古屋大学大学院工学研究科の新井史人教授、丸山央峰准教授、益田泰輔特任准教授、小俣誠二特任助教らの研究グループ、東京大学大学院医学系研究科の相原一教授の研究グループ、東京大学大学院工学系研究科の光石衛教授の研究グループとの共同研究よるもので、同研究成果は、内閣府ImPACT公開シンポジウム(8月8日)、イノベーションジャパン2017(8月31日~9月1日)、第71回日本臨床眼科学会(10月12~15日)などで展示される。

|
図1 眼科手術シミュレーションシステムの概要 (左)眼科手術シミュレータの外観と模擬眼球 (右)現在搭載可能な手術モデルと計測システム(出所:東大病院プレスリリース) |
近年、医学教育の効率化や難手術の効果的訓練のため、精巧な手術シミュレータが求められているが、実際の人間の眼球や頭部の可動性を十分忠実に再現したものは存在していない。また、一部の網膜硝子体手術は難手術と言われているにもかかわらず、適切な模擬眼球が開発されておらず、術者の手技評価を行うためのセンサシステムも開発されていないという。
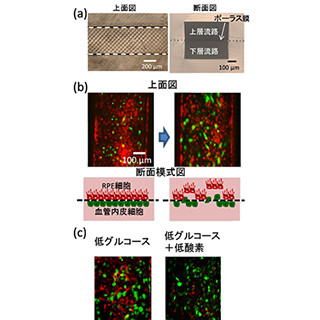
網膜硝子体手術においては、手術モデルとして特に、網膜上面の薄膜を剥がす内境界膜(ILM)剝離術と、網膜内の毛細血管に注射するマイクロカニュレーション手術が要求されている。同研究では、ILM剝離術の手術モデルとして、ポリビニルアルコールを主体とした化学架橋水和ゲルの薄膜・積層化を行うことにより、実際の生体ILMの剥離によく似た疑似ILMの開発に成功した。積層条件を変更することにより、難易度を変更することも出来る。また、マイクロカニュレーション手術の手術モデルとして、微細加工技術および水圧転写法を用いて、シリコーンゴム中に100マイクロメートル以下のマイクロ流路を曲面に沿って形成することに成功した。同モデルをそれぞれ模擬眼球に搭載させることにより、2つの眼科手技を練習することが可能となった。

|
内境界膜剝離術のモデル構想(左上)と内境界膜の剝離の様子(左下)と模擬手術風景(右)(出所:東大病院プレスリリース) |
また、術者の手技評価を行うためのセンサシステムとして、同研究では、頭部形状をリアルに再現した眼科手術シミュレータを開発。同シミュレータは、光弾性技術により、鉗子等が網膜部に押し付けられることによる変形を感知し表示する機能を搭載している。人間と同様な頭部形状を有し、首が可動するため、顔を横に向かせた状態での眼内観察を行うことが可能となっている。また、眼球眼位を最大で45度まで傾斜させることができるだけでなく、眼位に比例して反発力を増加する機構を搭載しており、眼位に応じた自然な復元力を実現しているという。
さらに、同研究により開発された模擬眼球を、同シミュレータに組込むことにより、縫合糸を用いた眼位の調整と固定が出来るようになり、実際の眼科手術に伴う一連の動作を模擬することが可能となった。特に、開瞼器による瞼の開口や、トロカールの設置、加圧インフュージョンシステムの導入、注射針を用いた眼球内の気泡除去、粘弾性の塗布、コンタクトレンズの設置、眼内洗浄等が行える。
同研究で開発した眼科手術シミュレータを用いることにより、従来では行うことの出来なかった手技の模擬と評価を行うと共に、一連の手術トレーニングを行うことが可能となった。45度まで眼位を調整することが可能になったため、今後は、緑内障手術が可能な眼球モデルの開発を行う予定だということだ。