ルネサス エレクトロニクスは4月11日、都内で国内では2014年以来となる大規模なプライベート・カンファレンス「Renesas DevCon Japan 2017」を開催。基調講演にて、同社 執行役員常務 兼 第一ソリューション事業本部本部長の大村隆司氏が同社の自動車に対する考え方や取り組みの説明を行ったほか、自動運転時代に向けた新たなコンセプト「Renesas autonomy」の発表を行った。
同社は自動運転が当たり前に存在する社会の向けて、「エコカー(電動化)」、「コネクテッドカー」、「自動運転」という3つのキーワードを踏まえ、ドライバーが運転を楽しむことを前提にSAEの定義する自動運転レベルが2もしくは3を中心とした「オーナー・カー」と、タクシーや荷物配送など業務を中心に、確実に運転を行うレベル4もしくは5が求められる「サービス・カー」の2つの潮流に分かれると見ている。「この2つの潮流をどう捉えて、技術開発を進めていくべきか。特にサービスを重視する動きをには気をつける必要がある」(大村氏)とのことで、従来の自動車メーカーの意図のみならず、自動車にサービスを提供するITプロバイダの意図も推し量っていく必要があるとする。

|

|
|
自動車業界と取り巻く3つのキーワードと、2つの潮流 |
|

|

|
|
ITプロバイダによるさまざまなサービスが自動車に向けて提供されるようになると、従来にはなかった自動車の活用が誕生する可能性もでてくる |
|
こうした中、ルネサスがどのように役立つのか、というと、例えば同社が4月10日に発表したHEV/EV向け100kW級インバータソリューションによる電動化支援が挙げられる。「EVはトラックなどにも広がっていくと見ており、そうしたニーズにも対応できる小型インバータを開発する必要があった」という。

|

|

|

|
|
100kW級ながら3.9Lのコンパクトを実現したインバータを新たに開発。写真は、DevCon会場でのデモ展示の様子 |
|
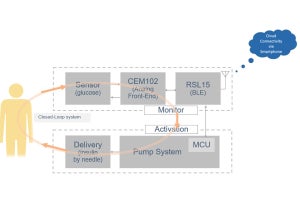
また、コネクテッドカーに対しては、「クルマの中に搭載されているマイコンは、現在、一般乗用車で50個程度だが、ADASの機能が増えれば100個程度にまで増加する。また、そこからの情報がクラウドに送られる、という点に注意する必要がある」とし、そこから生み出されてくるサービスを、より安全に活用するための堅牢性の高いコミュニティゲートウェイによって、車内外のセキュアな通信のもと、実現できるようにしたとする。

|

|
|
ルネサスのクラウドサービス連携に向けた半導体ソリューション。セキュアなゲートウェイを活用することで、ネットワーク上から悪意のある攻撃を受けても、車内のシステムを守ることを可能としている |
|
さらに、先般、日本で公開したリンカーンベースの自動運転車に代表される自動運転では、2018年に向け、レベル4の実用化を目指し、10~15台のカメラ、5~12台のレーダー、2~6台のLiDARを接続した状態の自動運転車の開発を目指す模様で、レーダーソリューションをAnalog Devices(ADI)と共同で行ったことを明らかにしたほか、スマートカメラ用画像認識向けSoC「R-Car V3M」も開発したことを明らかにした。

|

|
|
ルネサス/ADIによるレーダーソリューションの概要 (提供:ルネサス エレクトロニクス) |
|

|

|
|
DevCon展示会場にてデモが行われていたレーダーソリューション。左がRH850/V1R-Mの基板。モジュールとしては、右のレーダー部が上に被さる形になり、RH850が見えないため、敢えて外したものも用意したとのこと |
|
このR-Car V3Mは、ルネサスが自動運転の実現に向けて、エンドツーエンドのトータルソリューションを提供するコンセプト「Renesas autonomy」の第一弾製品に位置づけられるもの。NCAP安全基準を満たすカメラの開発向けSoCという位置づけで、進化した画像認識エンジン「IMP-X5-V3M」を搭載することで、高い画像認識能力やオプティカルフロー、ニューラルネットワークなどの高速処理を可能としている。また、カメラ向け信号処理を行うISPも搭載。これにより、センサからのRAWデータを直接利用して、アルゴリズムにあわせた信号処理を行うことが可能となったという。

|
|
R-Car V3Mの概要 (提供:ルネサス エレクトロニクス) |

|

|
|
DevCon展示会場にてデモが行われていたR-Car V3Mの評価キット |
|
ちなみに、同社の2016年会計年度(2016年4月~12月)の間、車載分野の新規商談は6500億円を突破し、そのうち約2000億円ほどがADAS関連になっているという。とはいえ、複雑化する自動車のエレクトロニクス化に同社1社で対応していくことは難しく、大村氏も「ルネサスだけでできないことをパートナーと一緒になってやっていきたい」と述べており、200社ほど居るR-Carコンソーシアムのパートナーを含め、Renesas autonomyのコンセプトの下、さらなる自動運転の実現に向けた取り組みを進めていくことを強調。今後のルネサスの自動車分野への取り組みに期待してもらいたいとし、パートナーと共に、より良いソリューションの実現を目指していくとした。

|

|

|
|
Renesas autonomyのコンセプトは、クラウドサービスからセンシング、車両制御までエンドツーエンドでパートナーを交えてトータルソリューションで提供しようというもの。同社は、まだまだ自動運転に対する心理的障壁などが存在しており、真の自動運転時代を実現するためには、こうした取り組みが必要としている |
||