大阪大学(阪大)などは11月11日、内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として災害対応重作業ロボットの実験機を開発したと発表した。
同実験機は、ImPACTタフ・ロボティクス・チャレンジの研究開発課題「災害対応建設ロボットの開発」で主な要素技術の開発が進められているもので、今回、同実験機での一連の評価により開発コンセプトに描いた建設ロボットの実現に目処が得られたという。
外観は通常の油圧ショベルだが、新しい油圧システムと制御手法を適用したことで、従来の建設機械に比べて高い運動制御性を実現したほか、手先負荷力推定や触覚センシングの技術により、遠隔操作による精密で確実な作業が可能となった。また有線給電ドローンによる長時間周辺監視と、任意視点の俯瞰画像生成や霧などを透過して映像を取得する極限画像処理システムを搭載することにより、ロボットの外にカメラを置かずとも、対象物や地形を視点を変えながら見ることができ、複雑な地形でも容易で安全な移動ができるようになっている。
同研究グループは、今回性能を確認した要素技術以外にも複数の要素技術の開発を行っており、2重旋回機構と複腕を有する新しいロボットの開発を進めていくとしている。

|

|
実験機の外観 |
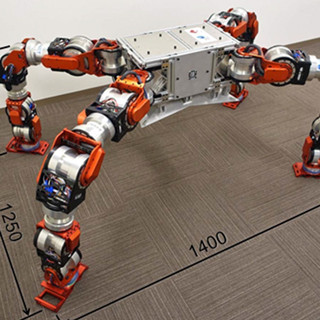
ロボットの最終コンセプトのイメージ |