早稲田大学(早大)と三菱重工業(三菱重工)は4月28日、脚型ロボットのための2点支持による垂直はしご昇降が可能なアルゴリズムを開発し、1肢ずつ動かしていた3点支持に比べ、12倍速い垂直はしご昇降を実現したと発表した。
同成果は、早稲田大学 理工学術院 創造理工学部 総合機械工学科 高西淳夫教授、早稲田大学高等研究所 橋本健二助教、三菱重工業らの研究グループによるもの。
これまで垂直はしごの昇降は、滑落防止のため4肢のうち3つを固定した、3点支持のみでしか実現されておらず、この方法では、昇降にかかる時間が極めて長いという課題があった。また、人によるはしごへの取り付け作業が必要となっており、はしごへの取り付きから昇降という一連の動作の実現には至っていなかった。
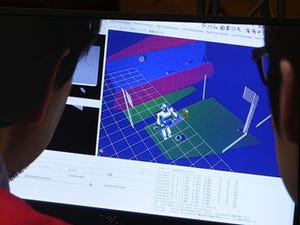
今回、同研究グループは、脚型ロボットを多質点モデルで近似し、全身の各質点の運動の影響を考慮し、把持点での反力を活用する新たなアルゴリズムを開発することで、左手左足あるいは右手右足の2点支持による垂直はしご昇降を実現。これまでの3点支持によるはしご昇降では、1肢ずつ次の桟に移動させ、最後に胴体を持ち上げるという5つの動作で1桟を昇降していたが、2点支持を採用することではしご昇降動作数を減らし、昇降速度を12倍に速くすることができた。また、同アルゴリズムを応用することで、垂直はしごへの取り付き動作も可能となった。
同ロボットは、垂直はしごを昇り切り、上階の歩行路に移動することに成功しており、垂直はしごへの取り付きから昇り切りまでの一連の動作が可能になったことが確認されている。
同研究グループは、今回の成果について、垂直はしご上で機体が滑落しないための安定判別規範にもなるとしたうえで、災害時に垂直はしごが変形したようなタフな環境においても、滑落しないような運動生成が可能になり、さらに垂直はしご昇降中に外乱が加わっても把持点での反力を制御することで転倒が回避できるようになることが期待されると説明している。

|
脚型ロボットの2点支持による垂直はしご昇降 |