東京大学(東大)、リコー、ブルーイノベーションは3月16日、GPSの受信が不安定な環境下でも無人航空機(ドローン)の安定した自動飛行を実現する技術を開発したと発表した。
同成果は東京大学 大学院工学系研究科 航空宇宙工学専攻 鈴木・土屋研究室の鈴木真二 教授および土屋武司 教授らの研究グループと、リコーおよびブルーイノベーションの共同研究によるもの。3月24日~26日まで幕張メッセで開催される「ジャパンドローン2016」でデモ飛行を披露する予定。
ドローンは構造物点検、警備・監視、測量などさまざまなサービスで活用され始めているが、橋の下やトンネルの点検、施設・倉庫内の警備などGPSの受信が不安定、または受信ができない環境下では突然バランスを崩したり、自動飛行ができなくなり墜落するなどのリスクがある。
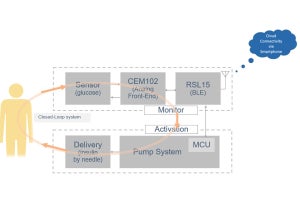
同研究で開発したシステムは、ブルーイノベーションと東大が開発した、安定した姿勢制御が可能な小型ドローンにリコーが開発した超広角ステレオカメラを搭載したもの。3次元空間での移動を計測するIMUセンサと超広角ステレオカメラの出力を融合させることでGPSに頼らない室内での安定した自動飛行を実現した。
同研究グループは、今後、さらなる性能・信頼性向上のため現場での実証実験が必要だとしている。

|
|
室内を飛ぶドローンのイメージ図 |