トピー工業は3月6日、福島第一原発の復旧作業を支援する探査ロボット「Survey Runner(サーベイランナー)」(画像1)を開発し、東京電力に貸与することを発表した。フリッパー(サブクローラ)を前方方向に2つ搭載したクローラ型のロボットだ。

|
|
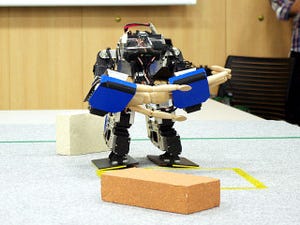
画像1。Survey Runner |
トピー工業では、従来より建物内での階段昇降が可能な防水性能の高いロボット移動用クローラモジュール技術を保有しており、これまでハイパーレスキュー向け探査ロボットなどの納入実績を持つ。
レスキューロボットや月・惑星探査ロボットなどの研究開発で知られる東京工業大学機械宇宙システム専攻の広瀬茂男教授と共同で、ロボット移動用のクローラモジュールの開発を2003年より進めてきた企業でもある。
そうしたこれまでの技術の集大成として開発されたのが、Survey Runnerだ。その特長だが、まず「移動モジュールの小型化」が挙げられる。クローラ走行システムを再構築し、階段昇降が可能な移動モジュールを大幅に小型化し、原発建屋内の非常に幅の狭い階段に対応して幅70cmでも昇降可能となった。
そして、「良好な階段昇降能力」。原子炉建屋内部の階段は前述したように狭いわけだが、それ以上にロボットにとって難敵なのが急勾配。角度にして40°以上あり、一度でも滑ったら踊り場などまで滑落してしまう可能性が高い。
さらに、階段は金属製なわけだが、放水作業などによって濡れており、人ですら足を踏み外しそうな滑りやすい場所も多いが、Survey Runnerは角度で45°の濡れた階段でも確実に昇降することができる(画像2)。昇降段差は最大で蹴上235mm。なお、防水および防塵保護等級はIP56だ。

|
|
画像2。Survey Runnerが急勾配の階段を降りてきている様子 |
また、「多彩な通信方式」も特長の1つ。建屋内では壁などに阻害され、無線通信による遠隔操作が困難になることも予想されることから、独自に開発した自動巻取・繰出機構付き有線通信装置(光ファイバケーブル400m)を搭載し、建屋内での遠距離運用を可能としている。
さらに通信機能に関しては、「ほかの作業ロボットへの通信中継機能」も持つ。原子炉建屋内で活動するほかの作業ロボットの無線通信トラブルに対応するための中継機を搭載している。そのほか、「記録機能も充実」しており、リアルタイムでの放射線量計測や映像の録画、データベース作成などの機能を持つ。
総重量は45kgで、最高速度は約2km/h、稼働時間は5時間となっている。また、5台のカメラ(パン・チルト・光学ズーム機能付き高性能カメラ×1、俯瞰カメラ(前後)×4)、転倒防止機能も備えている。スペックは以下の通りだ。
スペック
- 全長:505mm(フリッパー伸長時755mm)
- 全幅:510mm
- 全高:830mm(クローラ部約165mm)
- 総重量:45kg
- 昇降段差:蹴上235mm(最大)
- 昇降角:45°(最大)
- 稼働時間:5時間(バッテリ)
- 走行速度:約2km/h(最高)