公開されたフライトモデルを詳細解説
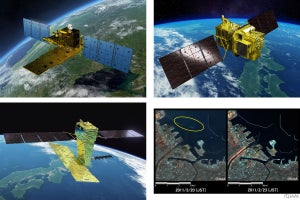
だいち4号に関する説明が行われたあと、報道陣は4班に分かれてクリーンルームに向かい、完成した衛星を見ることができた。衛星は打ち上げ時の向きで設置されていたのだが、軌道上では、この上下が逆さまになる。またレーダー、太陽電池パドル、SPAISE3は畳まれており、軌道上ではこれらを展開する。
-
バスは「DS1000」を使用。下側がバス部、上側がミッション部となる

上にある白い板が、レーダーの「PALSAR-3」である。5枚のパネルで構成されており、展開すると、幅約3.6m、長さ約10mという大きなアンテナになる。表面に10本の突起が見えるが、この中にはボルトが通っており、パネルを固定。軌道上では、これをボルトカッターで切断してから、モーターの力で展開するそうだ。
-
「PALSAR-3」のアンテナ

-
アンテナのヒンジ部

表面をよく見ると、12cmほどの小さな白い板がびっしりと貼られている。この1つ1つが、アンテナの素子。それぞれの波長を調整することで、電波を出す方向を変えられるフェーズドアレイ方式を採用しており、アンテナを物理的に動かして向きを変える必要は無い。
-
アンテナ素子は、全体で232個も搭載しているという

前述のように、観測幅は4倍に拡大しているが、これを実現したのが「デジタル・ビーム・フォーミング」(DBF)技術だ。従来は、一度に1方向しかビームを出すことができなかったが、PALSAR-3ではオンボードでの高速演算により、最大4方向の観測が可能になったという。
-
DBFの技術の概要

分解能を維持したまま、観測幅が4倍に広がったので、データ量も4倍になる。そのままだと、通信がボトルネックになってしまうため、だいち4号は新たにKaバンドアンテナを搭載。従来のXバンドより4.5倍高速な、3.6Gbpsの通信速度を実現している。
-
これがKaバンドアンテナ。直径は約30cmで、CFRP製の膜状素材を採用

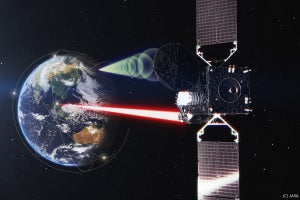
ただ、地上との直接通信は、衛星が1周する約100分間のうち、地上局が見えている10分程度しか使えない。そこで、だいち4号には、中継衛星を使って光通信でデータを送る装置も用意。この通信速度は1.8Gbpsで、これだと1周で40分の通信が可能だ。
-
これが光衛星間通信機器。「LUCAS」との通信を行う

軌道上では、太陽電池パドルを左右両翼に展開し、PALSAR-3は右側面に向けた状態で飛行する。そのため、基本的には進行方向の右側を観測することになるが、地震などが起きて緊急観測を行うときには、機体の向きを180°変え、左側を観測することも可能。衛星の姿勢を早く変えられるよう、リアクションホイールは5台搭載されている。
-
これは展開後の模型。奥から手前方向に飛行する

なお、だいち4号は当初、H3ロケット2号機で打ち上げる予定だった。しかし、初号機の失敗により、計画が変更。2号機はもともと、固体ロケットブースタ無しの「H3-30」形態になる予定だったが、初号機と同じ「H3-22」形態を使い、ダミーペイロードを打ち上げることになった。
H3ロケットは、3号機以降の計画がまだ決まっていないものの、順当に行けば、次はだいち4号が搭載されることになるだろう。ただ、その場合、少し気になるのは、打ち上げ時の振動環境の変化だ。ブースタ無しのH3-30形態に比べ、ブースタ付きのH3-22形態は、その分、振動が大きくなってしまう。
しかし、形態の変更による問題の検証はすでに完了しており、特に衛星側での追加対応は不要という結論が出ているとのこと。衛星はもともと、H3-30専用で設計していたわけではなく、バックアップとしてH-IIAも想定していたそうで、耐振性には余裕があった。その結果、変更無しでH3-22に乗せることが可能になったのだ。
-
ロケット側との結合部