ROSEロボットハンドの先端は半球の頂点を押し込み、窪ませたような形状だ。この窪みの底を軸とし、外側のスキンとこの軸を逆方向に回転させることでスキンにねじれを発生させ、それが窪んだ空間を閉じるように動作させることで把持が実現される。
従来の人の指を模倣したようなタイプでは、さまざまな対象物を把持する場合、それぞれに合わせた適切な姿勢制御が必要だ。しかし、ROSEロボットハンドは大面積接触と閉じた構造により、それぞれに合わせることなくさまざまな対象物の把持が可能である。特に、従来タイプでは困難だった油に浸した対象物の把持も実験で実証された。この対象物を選ばずに把持できる汎用性は、導入コストの軽減につながる可能性があるという。
-
オリーブオイルタンクから浸したゆで卵の把持の様子。(出所:JAIST Webサイト)

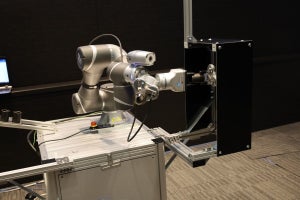
また研究チームは、耐久性に優れている点も特徴とする。耐久実験として、「把持対象物の上空からスタート→対象物まで下降→把持→持ち上げ→再び元の対象物があったところまで下降→把持解除→スタート地点へ戻る」という一連の流れが繰り返し行われた。その結果、40万回の把持動作に成功したとする。それ以降は、スキンが破損したものの、把持力の低下は見られなかったとしている。
さらに、把持状態での引張強さを測定指標とするため、把持力の測定が行われた。物体を掴んで保持し続けたままで、ROSEロボットハンドにかかる垂直方向の荷重を増加させ、破損するまでの荷重が計測された。その結果、平均400Nの荷重に耐えられ、耐久性が十分であることも確認されたという。
-
(a)繰り返し動作による耐久実験の様子。(b)把持力の測定の様子。(出所:JAIST Webサイト)

ROSEロボットハンドの想定される製品・サービスとしては、果物の種類を選ばずに収穫作業を代替するロボットと、被介護者のQOL(生活の質)を向上させるための生活支援介護ロボットの2点が挙げられた。今回の提案技術の汎用性を基に、幅広い分野でこれらの製品と新たなサービスを提供することで、ソフトロボットハンドの普及促進が期待されるとしている。