スポンジに水を含ませると、スポンジに塗布した脂質と界面活性剤とが親水性と疎水性のバランスによって自己組織化し、スポンジ内部に水を染み込ませる。このスポンジを油の中に入れると、スポンジから水が飛び出し、自然にμmサイズの脂質で安定化された液滴が形成される。この液滴の集団をピペットで吸い出して水面に垂らすと、レンガを組み合わせて壁を作るように、より大きく平面的な巨視的構造体へと、自発的に素早く集合するという。この技術により、直径200μmほどの液滴集団から全長3cmほどの構造が容易に形成できることが示されたとする。
-
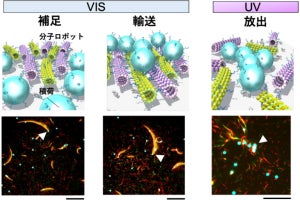
スポンジから抽出された液滴が自己組織化により多細胞体構造を作る様子のイメージ(出所:東北大プレスリリースPDF)

また、この形成手法は複数種類の液滴で行うことが可能だとする。異なる溶質を含む水で異なるスポンジを使い、異なる色素を使って異なるタイプの液滴を形成することで、液滴は互いに結合して不均質な構造を形成できる。これにより、さまざまなパーツを追加して組み合わせることで、複雑な形状の形成や、機能向上が可能になるという。
そして今回行われたデモンストレーションでは、疎水化した磁性ナノ粒子を多区画構造の疎水性膜に加えることで、構造全体を外部の磁場によって誘導することに成功したとする。さらに、磁性を示す部位と示さない部位とを別の場所に持つ構造を作り、機能の分離と同時に指向性を持たせることもできたとしている。
研究チームは、この平面状の構造体の作製が容易であること、また、その区画内に液体を効率よく封入できることから、この材料を医療用パッチとして応用することを検討しているという。そして、より長期的な研究により、この合成「細胞」的なアプローチに基づく分子ロボットのアイデアを発展させていく予定だとする。具体的には、分子ロボットに「プログラム性」や「生命性」を与える方法について検討中とした。
分子ロボットとしての可能性を広げるためには、より複雑な化学物質や、センサ、プロセッサ、アクチュエータとして機能する分子機械をカプセル化する必要があり、DNAや酵素、タンパク質がその候補だという。これらを用いることで、分子ロボットが周囲の環境に反応するようにできる可能性もあるとしている。
さらに将来的には、分子の自己組織化で組み立てられ、化学物質を利用する新世代のロボットに近づいていく可能性もあるという。研究チームでは、これらの構造が人間と機械の間のギャップを埋め、ロボットのイメージを再定義する第一歩になることを考えているとした。
-
(上)実際に形成された多細胞体構造。(下)その拡大図(出所:東北大プレスリリースPDF)