ロボットの一元管理による運用効率化「RobOps」
今後、ますます多種多様なロボットが世の中に現れ、それらを導入する企業の数も増えていくでしょう。その際、いかに効率よくロボットをスケールさせ、なおかつ、導入したロボットの運用管理を最適化するかが重要になります。
そこで注目を集めている新しいテクノロジーが 「RobOps」です。RobOpsとは、大量の異機種ロボットを管理運用する仕組みをいい、このRobOpsのソリューションを入れることで、コストを抑えながらスケール・運用の容易性を実現することが可能です。
RobOpsの市場はまだ始まったばかりで、製品やサービスは少ないですが、これから増えて行くと予想されます。RobOpsについては現在、Amazon Web Services(AWS)のRoboMaker、米国スタートアップではFormant、InOrbit等がサービスを提供しつつあり、今回はInOrbitのソリューションを例に、RobOpsの解説をします。
SaaSでRobOpsを実現する「InOrbit」
InOrbitは、RobOpsを実現するSaaSです。InOrbitで管理するロボットはインターネットへの接続が必要で、クラウド上のInOrbitのサービスとロボットを接続する必要があります。ロボットにInOrbit Agentをインストールすると、自動的にInOrbitのクラウドに接続され、InOrbitのダッシュボードからロボットを管理・運用できます。
ダッシュボード
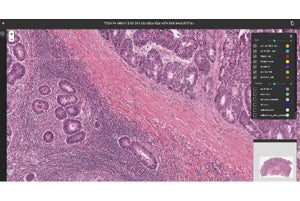
ダッシュボードでは、各ロボットの状態を一覧で表示します。ロボットのCPU使用率等のPCの情報、センサー等から取得される情報、ROSの状態等のアプリケーション情報、ロボットの場所情報等を一覧で表示することで、管理者が問題のあるロボットを見つけやすくします。また、問題点を確認するために、Rosbagやsyslog等に保存されているログ情報を表示します。
-
「InOrbit」のダッシュボード。ロボットの状態を一覧で表示される

遠隔操作・モニタリング
「InOrbit」は、ロボットを遠隔から操作したり、モニタリングしたりできる機能を提供します。Map上でRobotが自己位置をどう推定しているか、周りの状況をカメラでどのように認識しているかをモニタリングします。
また、自動走行等の自動での動作を中断してしまっているロボットについて、遠隔からマニュアル操作して再度自動走行を開始させることもできます。InOrbitではROS Topicで流れているMapの情報からロボットがどこに位置しているかを地図上に表示します。Robotの上下左右の遠隔操作や、ゴール地点を指定しての自動走行も行えます。
自動操作
センサーデータ等の条件に応じて、事前に指定されたスクリプトをロボット内で実行します。実行前には、管理者に承認を求めることも可能です。例えば電池の残量が減ってきたら、充電場所にロボットを自動的に移動させることが可能です。
動作履歴
ロボットは走行等の物理的な動作を行っているため、障害が起きた時刻や場所とログを突き合わせることができれば、障害対応が容易に行えます。それには、不具合が起きた時点から、時間を遡って各種センサーやステータス情報の確認をします。続いて、不具合を選択すると、その時のロボットの位置情報やCPU使用率等の各種データが表示されます。InOrbitではTime Capsuleという名称でこの機能が実装されています。
-
InOrbitでは「Time Capsule」でロボットの動作履歴を確認できる

以上、ロボットを導入する上での課題、課題の一つである運用を効率化する「RobOps」について説明しました。
今後、ロボットは新たな社会を築く上で一層大きな役割を担っていくことになるでしょう。特にサービロボットに関しては、新たな機能を持ったロボットが続々とリリースされていますが、現時点ではロボットを提供するベンダー側も、ロボットを利用するユーザー側も顧客課題を解決できるかという点に注力しています。
しかし、ロボット利用が進むと、今回紹介した4つの新たな課題が浮上してきます。その際は、社内のシステムや技術的な知見がある IT部門が欠かせない存在になります。そのため、ロボット導入の初期フェーズから、IT部門の積極的な関与、および4つの課題を意識しながらロボットプロジェクトを進めることが重要になります。
著者プロフィール
東根 真司(ヒガシネ シンジ)
ネットワンシステムズ株式会社 ビジネス開発本部 イノベーション推進部 インキュベーションチーム マネージャー
2006年 ネットワンシステムズに入社。セキュリティ、ロードバランサー、IoTを中心としたプロダクトマーケティングを経て、2017年よりシリコンバレーにある Net One Systems USAにて駐在を経験。現在は新規事業の企画から立ち上げに従事。
荒牧 大樹(アラマキ ヒロキ)
ネットワンシステムズ株式会社 ビジネス開発本部 イノベーション推進部 ビジネス開発チーム シニアエキスパート
2007年 ネットワンシステムズ入社。Collaboration、仮想化、クラウドの技術の担当を経て、現在はAIやRobotics等の先端技術の調査や立ち上げに従事。