タカラトミーは6月16日~17日、東京ビッグサイトにて開催された「東京おもちゃショー」にて、野球ボールサイズの超小型月面探査ローバー「SORA-Q」(ソラキュー)を公開した。同展示会はビジネス関係者限定ではあるものの、SORA-Qの一般への公開はこれが初めて。また同時に、商品化の計画も明らかにされた。
-
タカラトミーの「SORA-Q」。左が展開前、右が展開後の形状で、重量はわずか250gほど

SORA-Qは、宇宙航空研究開発機構(JAXA)の小型月着陸実証機「SLIM」に搭載され、2022年度中に打ち上げられる予定。最大の特徴は、何と言っても変形することである。搭載時には直径わずか8cmほどの球形だが、月面に投下後、外殻が両側に開き、カメラと尻尾を展開。外殻の半球がそのまま車輪となり、月面を走行する。
タカラトミーといえば、トランスフォーマーやゾイドなど、変形ロボットの玩具が思い浮かぶ。SORA-Qの開発には、これらの社内メンバーも関わっており、複雑に見える機構をいかにシンプルに実現するかなど、玩具メーカーならではのノウハウを投入したという。
-
展開前は球状だ。コンパクトに格納できて、落下時の衝撃にも強い

-
展開時は、幅が約123mm、奥行きが135mm。尻尾はスタビライザーになる

走行方法もユニークだ。車輪は中心ではなく、少しズレた位置に車軸が付いており(=偏心)、モーターを回すと、車輪自体も上下に動く。まるでレゴリスの海を泳ぐように見えることから、左右の車輪が交互に動くとき(位相180°)はクロール走行、同時に動くとき(位相0°)はバタフライ走行と呼ばれる。
-
よく見ると、車軸の位置が車輪の中心からずれていることが分かる

偏心車輪を採用したローバーというのは、極めてユニークである。この車輪には、グラウザー(羽根)が付いていないが、この小ささ・軽さでは、車輪自体をダイナミックに動かす走行の方が適している、という考えなのだろう。この2種類の走行モードが実際の月面でどのくらい効果的か、そのあたりも注目したいところだ。
SORA-Qの走行の様子
SORA-Qは月面に投下後、自律で動作する。ソニーの「SPRESENSE」がカメラボード/メインボードとして搭載されており、同社のAI技術を活用。カメラで前後方向を撮影し、良質のものだけを自分で選んで送信するという。
-
SORA-Qには、ソニーの「SPRESENSE」ボードを搭載している

-
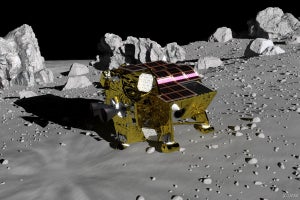
ブースには、SLIMの1/2スケールモックアップも展示されていた

また、民間のispaceも2022年内に独自の月面探査機を打ち上げる予定だが、これにSORA-Qの同型機が搭載されることも決まっている。ただ、SORA-Qが自律で動作するのに対し、ispace用は遠隔操縦になる予定だという。
月面の細かな凹凸などは、着陸してみないと分からない。遠隔操縦だと、時間がかかるというデメリットはあるものの、人間が映像を見て判断できるので、より確実だと言える。一方、自律だと待たずにどんどん進めるものの、想定外の事態に対応できなくなる恐れもある。2機で手法を変え、両方を試せるというのも興味深い。
今回、ブースで公開された機体は、開発で使われた「動作検証モデル」で、実際に月面に行くフライトモデルは、これとは別にJAXA側で保管されている。動作検証モデルは今回初めて一般に公開されたが、今後、各地の科学館などと協力し、見られるようになる可能性もあるそうなので、楽しみにしたい。
なお今回、SORA-Qをベースにした「プロダクトモデル」の商品化も決定した。販売時期や価格など詳細は未定なものの、SORA-Qと同じ形で同じ動きが可能になる予定だ。変形機能をしっかり再現するほか、カメラも搭載。さすがに砂場での走行までは難しいかもしれないが、室内で月面探査気分を体験できるだろう。
プロダクトモデルの動き
-
こちらがプロダクトモデル。かなり似ていて、簡単に見分けがつかない

-
プロダクトモデルに続いて、宇宙をテーマにした玩具も展開するという