タッチダウンシーケンスも変更に
ピンポイントタッチダウン方式を採用したことで、降下シーケンスも当初の計画から変更されている。
タッチダウン運用は、前日21日8時すぎから開始。高度20kmのホームポジションから、秒速40cmのゆっくりした速度で降下していく。同日夕方には高度5kmに到達、ここで秒速10cmに減速し、降下を継続。翌22日7時すぎ、高度45mまで接近したところで一旦停止し、高度計測をLIDARからLRFに切り替え、8時前にタッチダウンする予定だ。
小惑星表面への接地を検出すると、弾丸を発射。飛び散った表面物質はサンプラーホーンを経由して、探査機内部のサンプルキャッチャーに取り込まれる。接地は数秒程度で、すぐ探査機はスラスタを噴射して離脱。ホームポジションへ向かって帰還するというのが全体の大まかな流れだ。
-
タッチダウン運用のシーケンス。時刻は決定ではなく、変わる可能性がある (C)JAXA

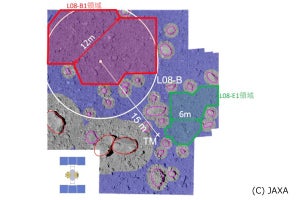
今回、L08-E1への着陸で、特に大きく変わったのは高度45m以下の低高度での運用だ。ここでは、まずターゲットマーカーをカメラの視野に入れて捕捉。視野の中心に捉えながら、高度8.5mまで降下する。
ここまで、探査機は通信のため、ハイゲインアンテナを地球に向けていたが、ここで姿勢を変更して、小惑星表面の地形に合わせる。なお従来は、LRFで地面の傾きを検出し、姿勢を平行にしていたが、今回はプリセットした値を採用する。これは、100m四方へのタッチダウンとは違い、狭くて不確定性が無いため、プリセットの方が確実という判断だ。
この時点まではターゲットマーカーを視野の中心に捉えてきたが、ここからオフセットを開始し、水平方向に移動。指定したオフセット点に到着したらホバリングで停止、ヒップアップの着陸姿勢に変更したことを確認してから、スラスタを噴射して着陸地点まで一気に自由落下させる。
-
高度8.5mに到達してからの探査機の動き方 (C)JAXA
この高度では地球からの指示が間に合わないため、探査機は自律的に状況を判断して行動することになるが、安全を確保するために、4カ所にチェックポイントを設置。各チェックポイントで指定しておいた条件を満たしたときのみ次のシーケンスに進み、1つでも異常があればアボート(緊急上昇)する計画だ。
各チェックポイントで確認する項目は以下の通り。
- LIDARからLRFへの切り替え(高度45m)
- ターゲットマーカーの捕捉(同)
- 地表に想定以上の凹凸が無いか(高度8.5m)
- オフセット点での姿勢・位置の安定(同)
自由落下してからはどうしても誤差が発生してしまうため、目的の円内に着陸できるかどうかは、オフセット点での姿勢と位置をいかに正確に維持できるかがカギだ。今回、オフセット点では、ターゲットマーカーに対し、±25cmの精度で位置を制御する予定とのこと。これさえ実現できれば、直径6m円内への着陸はほぼ確実にできるだろう。
-
低高度におけるシーケンス。チェックポイントが4つ設定されている (C)JAXA

とはいえ、当初の想定より遥かに狭い領域への着陸はリスクも大きく、まず探査機の安全を第一に考え、チェックポイントの条件は「厳しめに設定した」(同)とのこと。アボートになる可能性も低くは無いだろうが、津田プロマネは「アボートは再度のチャンスがあるということ」と前向きに捉える。
アボートがあった場合の再挑戦の日程だが、最速では、バックアップ期間として設定されていた3月4日の週になる見通し。ただ、アボートの種類によっては、大きな対策が必要になる可能性もあり、その場合は改めてアンテナを借りる海外機関とも調整し、期間を設定することになる。
なお昨年末の12月28日には、フライトモデルの同等品を使った弾丸の発射実験が行われたという。リュウグウ表面を模擬したターゲットに弾丸を撃ち込んだところ、想定したとおり、表面物質が飛び散る様子が確認できた。初号機がなし得なかった正常な手順でのサンプル採取に、はやぶさ2がいよいよ挑む。そのための準備は整った。
-
弾丸は正常に発射。岩石を破砕し、粒子が放出される様子を確認できた (C)JAXA