はやぶさ3はvSLAMで自律降下も?
また、ロボット分野で一般的になってきている技術「vSLAM」を宇宙探査に活用する研究も進められている。自己位置の推定と環境地図の作成を同時に行うのが「SLAM」(Simultaneous Localization and Mapping)だ。その中でも特に、カメラ画像を利用するものがvSLAM(Visual SLAM)で、ロボット掃除機などでもすでに実用化されている。
JAXA宇宙探査イノベーションハブでは2017年3月、vSLAMについて共同研究先を公募、民間企業から提案のあった2件を採択し、同年10~11月より研究を開始していた。この研究で得られたvSLAM技術を、はやぶさ2のタッチダウン運用に活用する計画だという。
-
この4社とvSLAMについて共同研究を実施。その成果を活用する (C)JAXA
-
vSLAMはカメラ画像で空間を認識。人間の目に近い技術と言える (C)JAXA


はやぶさ2のタッチダウン運用では、高度100mを切った最終局面では完全自律になるものの(電波の往復に30分ほどかかり、地上からの指示が間に合わないため)、それまでは地上からのサポートを受けながら降下していく(GCP-NAV)。
このとき地上では、探査機から送られてきた画像データを元に、探査機の位置を推定する作業を行っている。探査機の位置によって、小惑星の見え方は変わる。コンピュータ上の形状モデルを使い、探査機の位置を変えてみて、小惑星表面の特徴点や輪郭が実際の画像と一致すれば、実際の探査機もその場所にいるはずだ。
-
タッチダウン運用の流れ。途中までは地上からの支援を受ける (C)JAXA
-
GCP-NAVで使用するツール。スライドバーを動かし、特徴点を合わせる (C)JAXA


現在は人工知能(AI)による画像認識技術が進歩してきているものの、こうした複雑な判断は、まだまだ人間の方が得意。通信時間の遅れはあるものの、より安全で確実ということで、こうした方法が初号機から採用されている。
しかしvSLAMを適用できれば、こうした地上からのサポートを受けずに、探査機が完全自律で降下できるようになる可能性がある。特に、表面にあまり特徴がない場所だと、従来手法では難易度が上がるが、vSLAMを使えばより正確な計測が可能になる。
ただ、新技術をいきなり本番で採用するのはリスクが大きすぎるため、はやぶさ2のタッチダウン運用では、クロスチェック用の参考情報として活用する予定とのこと。ハブ長である久保田孝氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 教授)は、「この技術を使えば、将来はターゲットマーカー無しで着陸できるようになる可能性もある」と、期待を述べる。
-
久保田孝氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 教授)

気になる着陸点はどこに?
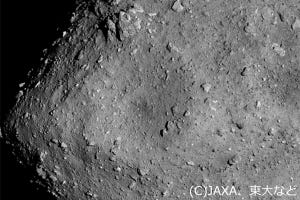
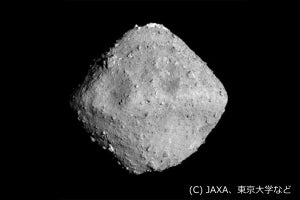
今後の運用計画であるが、すでに中高度降下運用は7月31日~8月2日に、重力計測降下運用は8月5日~8月8日に実施。どちらも予定通り完了し、重力計測降下運用では、高度851mまで接近することに成功した。撮影した画像を見ると、リュウグウ表面には大小さまざまな岩石があることが分かる。
重力計測降下運用で撮影した画像。左は高度約1250m、右は高度約1000mから撮影したものだ (C)JAXA、東大など


次は8月下旬に、残る「BOX-B」運用を実施する。小惑星に接近する「BOX-C」運用については前回説明したが、BOX-Bはホバリング領域を横方向に拡張する運用である。距離は変わらないが、南北方向と東西方向に±10kmの幅で移動することで、ホームポジションからとは違う角度でリュウグウを観察できる。
-
はやぶさ2のミッションスケジュール。今のところ順調に進捗中 (C)JAXA
-
各BOXの定義。BOX-Bは南北方向と東西方向に拡張する (C)JAXA


このBOX-B運用では、主に南北方向に移動し、極域を重点的に観測する予定。NIRS3で観測すれば、極域に水が残っているのか、それとも他の地域と同様に乾いているのかが明らかになるはずだ。
今のところ、8月下旬に着陸地点の選定を行い、9~10月にローバー・ランダーの降下とタッチダウンを行う計画に変更は無い。リュウグウ表面に安全に着陸できる場所があるのかどうか気になるところだが、吉川真ミッションマネージャ(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)によれば、工学側としては「候補は10数カ所に絞れた」という。今後、サイエンス側の要求とすり合わせ、決定されることになるだろう。
-
吉川真ミッションマネージャ(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)