シミュレータ上の仮想空間で災害対応ロボットが技術を競い合う……それが「ジャパン・バーチャル・ロボティクス・チャレンジ」(JVRC)である。新エネルギー・産業技術総合開発機構(NEDO)が主催するこの競技会は、今年が初開催。10月7日~10日、CEATEC JAPAN 2015の会場内で実施され、国内の10チームが出場した。
災害対応ロボットの競技会というと、今年6月に米国で開催された「DARPA Robotics Challenge」(DRC)を思い出す人も多いだろうが、JVRCはその"日本版"と言えるかもしれない。ただ大きく異なるのは、完全にバーチャルな競技であるということだ。実機のロボットが動くことは無く、PCの画面内で静かに競技が進んでいく。

|

|
|
JVRCの会場。CEATEC JAPAN 2015の1ブースとして競技を実施していた |
競技は4チームが同時に実施。会場のモニターで状況を確認できる |
なぜバーチャル?
ロボットは、メカ、エレキ、ソフトウェアなど、様々な分野の技術が必要になる総合的なシステムだ。そのため災害対応ロボットのように、ミッション内容が高度で機体サイズが大きいものになると、予算的にも人員的にも、開発できる組織は限定されがちだ。

|

|
|
会場には、DRCに出場した「HRP-2改」(左)と「JAXON」の実機も展示 |
HRP-2改は通常のHRP-2に比べると、首や手足が長くなっている |
しかしJVRCであれば、ロボットのハードウェア開発は不要。PCと開発環境を用意すれば良いだけなので、出場への敷居はかなり下がる。今回、JVRCには12チームがエントリーし、当日の競技にはそのうちの10チームが出場したが、中には個人での参加もあった。DRCでは、Atlasのような標準プラットフォームを用意することで、ソフトウェア開発に専念することもできたが、シミュレータならばロボットを動かすための広い部屋も要らない。
シミュレータとしては、産業技術総合研究所(産総研)の中岡慎一郎氏が中心となって開発しているロボット用統合GUIソフトウェア「Choreonoid」(コレオノイド)を使用。Choreonoidは多機能なソフトウェアで、JVRC専用というわけではないのだが、動力学シミュレーション機能を持っており、これに競技タスクのモデルをインストールして、今回のシナリオであるトンネル災害を模擬する。

|
|
筆者のPCにインストールしてみたChoreonoidの画面 |
このほか動かすロボットのモデルデータも必要となるが、JVRC用に開発された「JVRC-1」のデータが配布されており、無償で利用できる。JVRC-1は仮想のヒューマノイドロボットなのだが、実機が開発されている「JAXON」「Hydra」「HRP-2改」のモデルも用意されており、たとえ実機を持っていなくても、これらのデータでJVRCに参加することが可能だ。もちろん、完全にオリジナルのロボットを作っても構わない。

|

|
|
ほとんどがヒューマノイドだったが、オリジナルのクローラ型も |
HRP-2改をベースに、一部を改造した機体。頭頂部にカメラがある |
DRCでは、高価なヒューマノイドロボットがあちこちで転倒するのが衝撃的であったが、シミュレーションであれば、転倒による故障の心配は無い。シミュレータ上とは言え、ヒューマノイドの転倒は心が痛むものではあるが、リスクが高いミッションにも気軽に何度でも試すことができるのは大きなメリットだろう。実際に産総研では、Choreonoidを日常的に研究開発に利用しているそうだ。

|

|
|
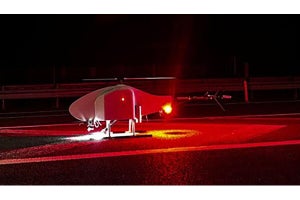
不整地で転倒したHRP-2改。バーチャルとは言え見るに忍びない |
DRCでは転倒→即リタイアだったが、JVRCだと起き上がることも可能 |
筆者は日頃からロボット業界を取材しているが、日本はハードウェアなどモノづくりは得意なものの、ソフトウェアや、社会への適用などの部分が、少し後手に回っているような印象を受ける。競技をソフト部分に特化することで、より人口が多いIT業界など、異業種からの人材やアイデアの流入も期待できるだろう。